産業技術大と芝浦工業大、多種多様なロボット情報を集約し、ネットワーク実証実験を実施 ~サービスロボットの普及を目指し市場化推進へ~
@Press 2018年11月05日 14:00:00
多種多様なロボット情報を集約し、ネットワーク実証実験を実施
芝浦工業大学ブース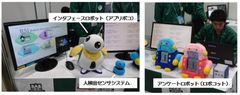
ロボットサービスイ二シアチブブース
東京都立産業技術研究センターブース
https://www.shibaura-it.ac.jp/news/2018/40180151.html
この実験は、ロボットサービスイニシアチブ(RSi)(※2)と協力して2018年10月17日から19日にかけて東京ビッグサイトで開催された「Japan Robot Week 2018」にて4ブースで実施されました。これまでも実験を重ねてきましたが、従来の研究よりさらに運用イメージが具体化。異なる機関・企業のロボットから共通のデータ形式で各ロボットの稼働状況データを取得・一括管理したり、移動ロボットからオドメトリを取得してロボットの位置情報を把握できることを確認しました。今回新たにRSNPを使った情報収集モジュールを開発し、ソフトウェアが実装できない企業でも簡単に接続することも可能にしました。
今後、地域での実証や参加企業を増やし、サービスロボットの活用の場を広げ、市場化の推進を行う予定です。
※1 RSNP(ロボット・サービス・ネットワーク・プロトコル)
通信規格。サービスロボット開発用に公開されており、このパッケージを使って簡単にロボットのネットワーク化を実施することができる。
※2 RSi(ロボットサービスイニシアチブ) http://robotservices.org
RSiはパーソナルロボットによる通信ネットワークを活用した魅力あるサービス(ロボットサービス)を簡単かつ便利に利用できる社会を目指し、相互運用性のあるロボットサービスについて関連団体と協力・連携しながら仕様の作成・公開、実証実験、普及促進を行うことを目的とした任意団体で、日本ロボット工業会内に事務局がある。
なお、今回の実証実験は、RSi、東京都立産業技術研究センター、神奈川県立産業技術総合研究所、SOCIAL ROBOTICS株式会社、ベクトル株式会社、タケロボ株式会社のご協力により実施できたものです。
■システム概要とネットワーク実験に導入したロボット
ロボット/システムの開発は、以下の通り。
- RSNPを使った情報収集モジュール -- 芝浦工業大学機械機能工学科知能機械システム研究室
- 人検出センサシステム -- 芝浦工業大学機械機能工学科知能機械システム研究室
- ロボットからの多様な情報の集約・表示システム -- 産業技術大学院大学産業技術研究科情報アーキテクチャ専攻成田研究室
- “かしらロボ”と“浄瑠璃ロボ” -- 産業技術大学院大学産業技術研究科情報アーキテクチャ専攻成田研究室
- 移動ロボットLibra Cargo -- 東京都立産業技術研究センター
- 移動ロボットBUDDY -- SOCIAL ROBOTICS株式会社、ベクトル株式会社
- アンケートロボット -- タケロボ株式会社
【連携デモ表示画面】
画像1: https://www.atpress.ne.jp/releases/169822/LL_img_169822_1.png
{kind=link}
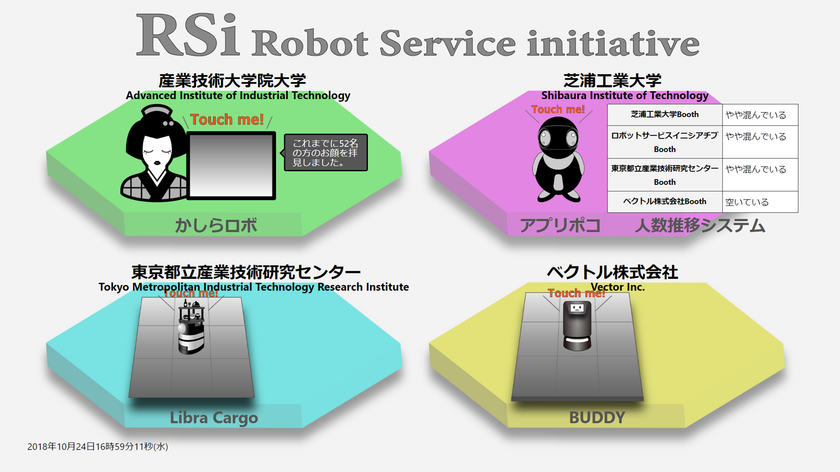
多種多様なロボット情報を集約し、ネットワーク実証実験を実施
4ブースのロボットの情報を表示している。
ブース周りの人の位置・混雑度、ロボットの発話回数、移動ロボットのブース内の位置などの情報を一括管理。
【各ブースの様子】
<芝浦工業大学ブース>
https://www.atpress.ne.jp/releases/169822/img_169822_2.jpg
{kind=link}
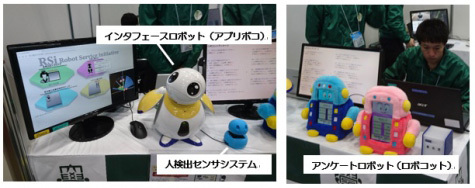
インタフェースロボットで展示内容の説明、挨拶をする。その発話回数を品川にある産業技術大学院大学のRSNPサーバーへ送る。人検出センサシステムでは人の人数や混雑度をRSNPサーバーへ送る。これらの情報を連携デモ画面でインターネット経由で表示している。
右側のアンケートロボット2台では、展示のアンケートを実施している。アンケート結果はRSNPでブース内に置かれているノートPCのRSNPサーバーに送られ、後ろのディスプレイに結果が表示されている。また、アンケート入力があるとその回答件数が品川のRSNPサーバーに送られ、連携デモ表示画面に表示される。
<ロボットサービスイ二シアチブブース>
https://www.atpress.ne.jp/releases/169822/img_169822_3.jpg
{kind=link}
産業技術大学院大学産業技術研究科情報アーキテクチャ専攻成田研究室が開発したかしらロボと浄瑠璃ロボ。浄瑠璃人形を参考にした人の頭を模した3次元の身体性を持つロボット。かしらロボは、うなずき、まばたき、発声にともなう口の動きを実現しており、実物の人形大で動きがはっきりし注目を引きやすい。浄瑠璃ロボは、うなずき、まばたき、口の動きに加え、腕の動きを実現しており、視認性が高い。
これらはタッチパネルディスプレイと組み合わせて来場者向け呼び込み・アンケートの表示と回答を行うことができる。
既に開発した2次元のサイネージロボットに比べて、デザイン、動きのユニークさから多くの人の関心を集め、アンケートの回答者に対して親みやすく集客の効果が良い。
<東京都立産業技術研究センターブース>
https://www.atpress.ne.jp/releases/169822/img_169822_4.jpg
{kind=link}
左の移動ロボット(Libra Cargo)の移動した位置情報をRSNPサーバーに送り、人検出センサシステムでは人の人数と混雑度をRSNPサーバーに送信する。これらの情報はインターネット経由で連携デモ表示画面に表示される。移動ロボットにはRSNP情報収集モジュール搭載。
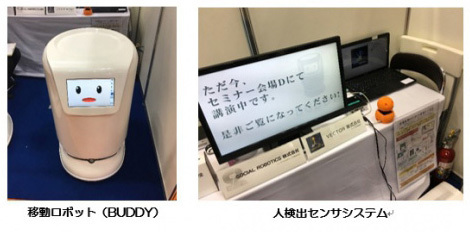
<SOCIAL ROBOTICS株式会社、ベクトル株式会社ブース>
https://www.atpress.ne.jp/releases/169822/img_169822_5.jpg
{kind=link}
左の移動ロボット(BUDDY)の移動した位置情報をRSNPサーバーに送り、人検出センサシステムでは人の人数と混雑度をRSNPサーバーに送信する。これらの情報はインターネット経由で連携デモ表示画面に表示される。RSNP情報収集モジュール搭載。
情報提供元: @Press